Specimen
01
computer vision · GCP
visit site Vizioneer
AI-powered camera analytics for dark stores & cloud kitchens.
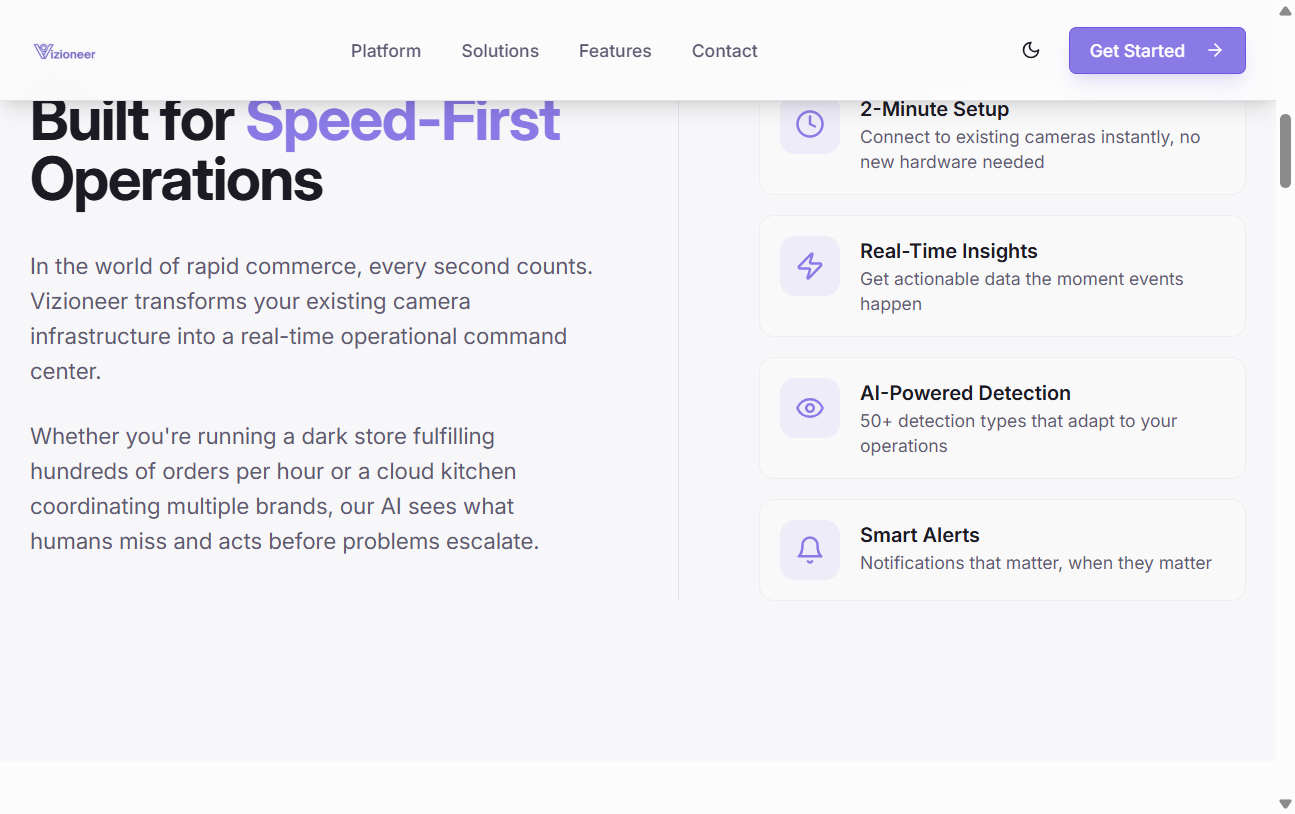
Vizioneer turns existing camera infrastructure into a real-time operational command centre for rapid commerce. Vision Language Models and classical machine vision work in concert to track orders, optimise picking routes, and detect bottlenecks — from cameras already mounted on the ceiling. No new hardware. Setup measured in minutes. Cameras are used for order and route tracking; the system does not identify, profile, or score staff.
technology stack
key features
40%
faster picks
99.5%
accuracy
2min
setup

analytics dashboard
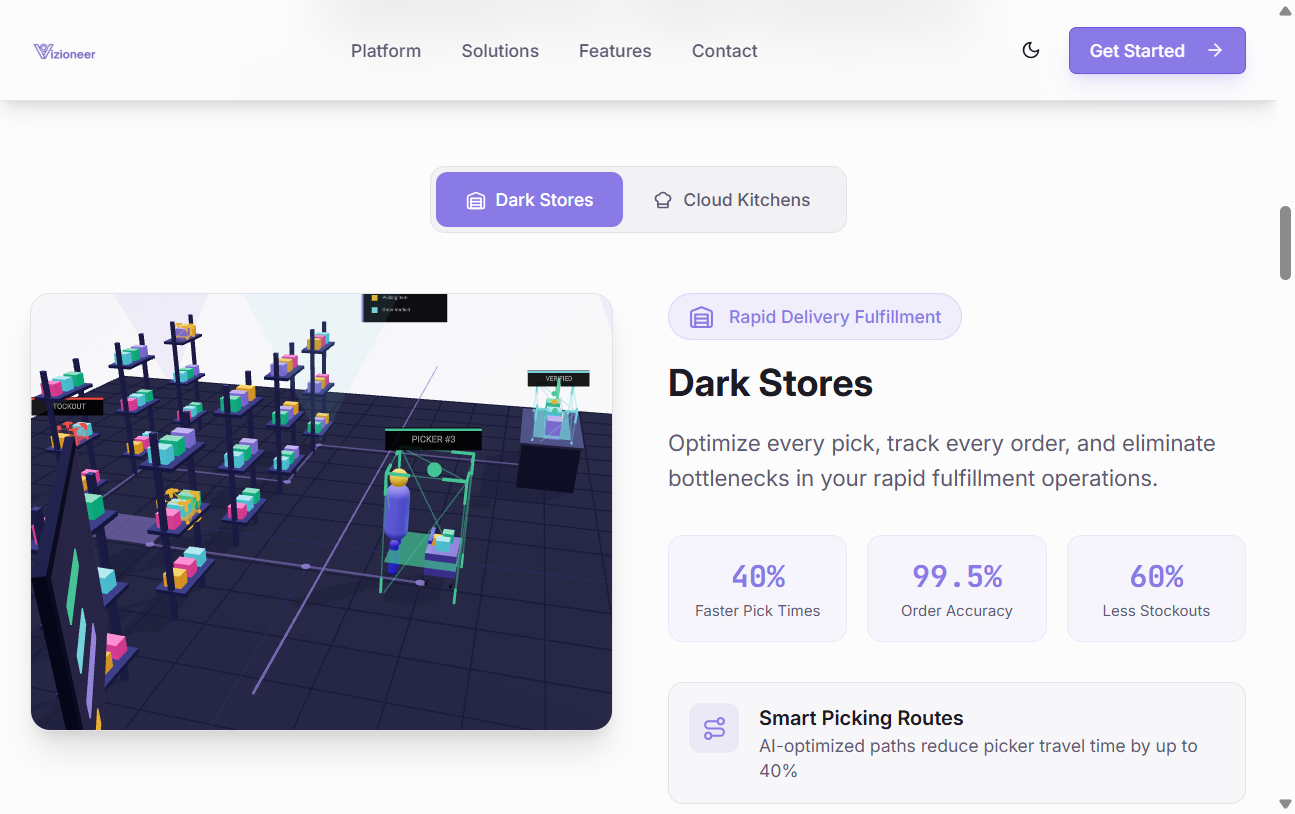
dark store optimisation
platform architecture